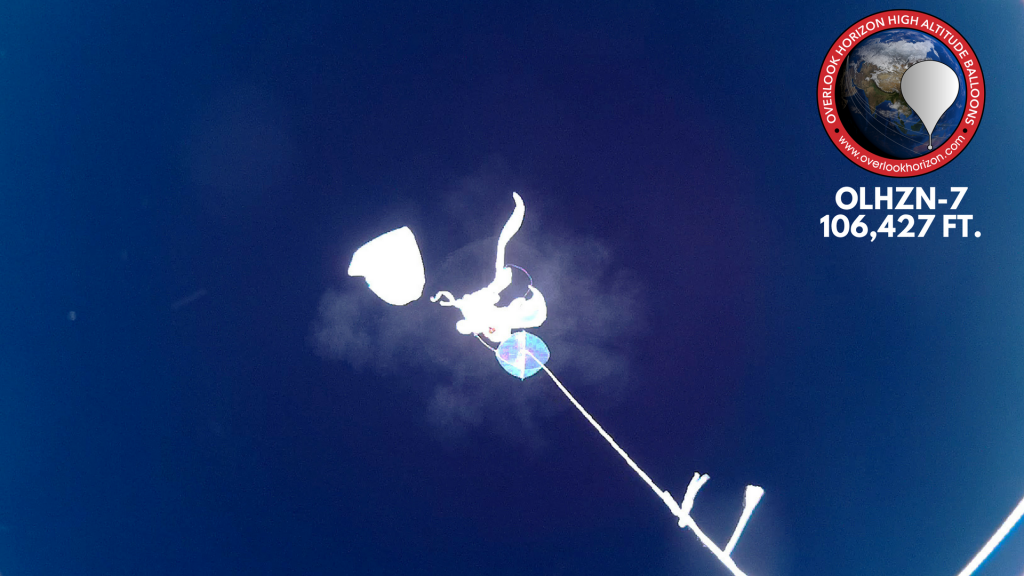
Result: Partial Success! 106,427 FT.
OLHZN-7 was the seventh high altitude weather balloon flight for Overlook Horizon High Altitude Balloons. This flight occurred launch on July 17, 2017 at 5:30:08pm ET (21:30:08 UTC). The focus of this flight was to have a short recovery distance and we were also looking for interesting wind patterns for this flight. Additionally, since our balloon facing camera failed early on OLHZN-6, we reused the main OLHZN-6 objective, which was to obtain video of the balloon burst event. We eliminated our experimental Lightdow LD-V3 Camera which was used on OLHZN-6 to record at 1080p and 60 fps. This camera failed on OLHZN-6 at about 70,000 ft. and subsequently missed the balloon burst event. Instead, we used a third Lightdow LD4000 Camera which is the same camera we use on our side views that is flight proven and capable of recording the entire flight from launch to landing. Our primary radio tracking system failed in-flight at 1 hour and 45 minutes into this flight. This was due to a voltage drop issue that occurred at low temperatures when the radio transmitter started its broadcast. We will attempt to resolve this on OLHZN-8. This flight was successfully recovered from our backup GPS source upon landing.
Flight Day Story
The launch of OLHZN-7 occurred flawlessly with a perfect on-time launch at exactly 5:30pm ET (21:30 UTC). The entire launch preparation operated perfectly and all ground systems were in-tact and running flawlessly. The first radio signal was received by the APRS network just 17 seconds after launch at 1102 ft. which is only 262 ft. above our ground level altitude of 840 ft. This initial signal reception is must faster than we’ve ever experienced from this launch location. The flight operated perfectly for the first hour until 6:31:23pm ET (22:31:23 UTC) when we experienced the first of many power cycles. The Arduino Mega would go on to have 35 power cycles over the course of the next 44 minutes. At 7:15:35pm ET (23:15:35 UTC) the Arduino Mega enter into an endless power cycle loop causing power cycles every six seconds indefinitely for the remainder of the flight. The Arduino Mega’s software is designed to broadcast its position as the very first thing upon startup. This was implemented as a means of quickly getting a positioning transmission out after we lost tracking on OLHZN-2 just prior to landing due to a power cycle issue as well. The flight proceeded for another 63 minutes until landing occurred at 8:18pm ET (00:18 UTC).
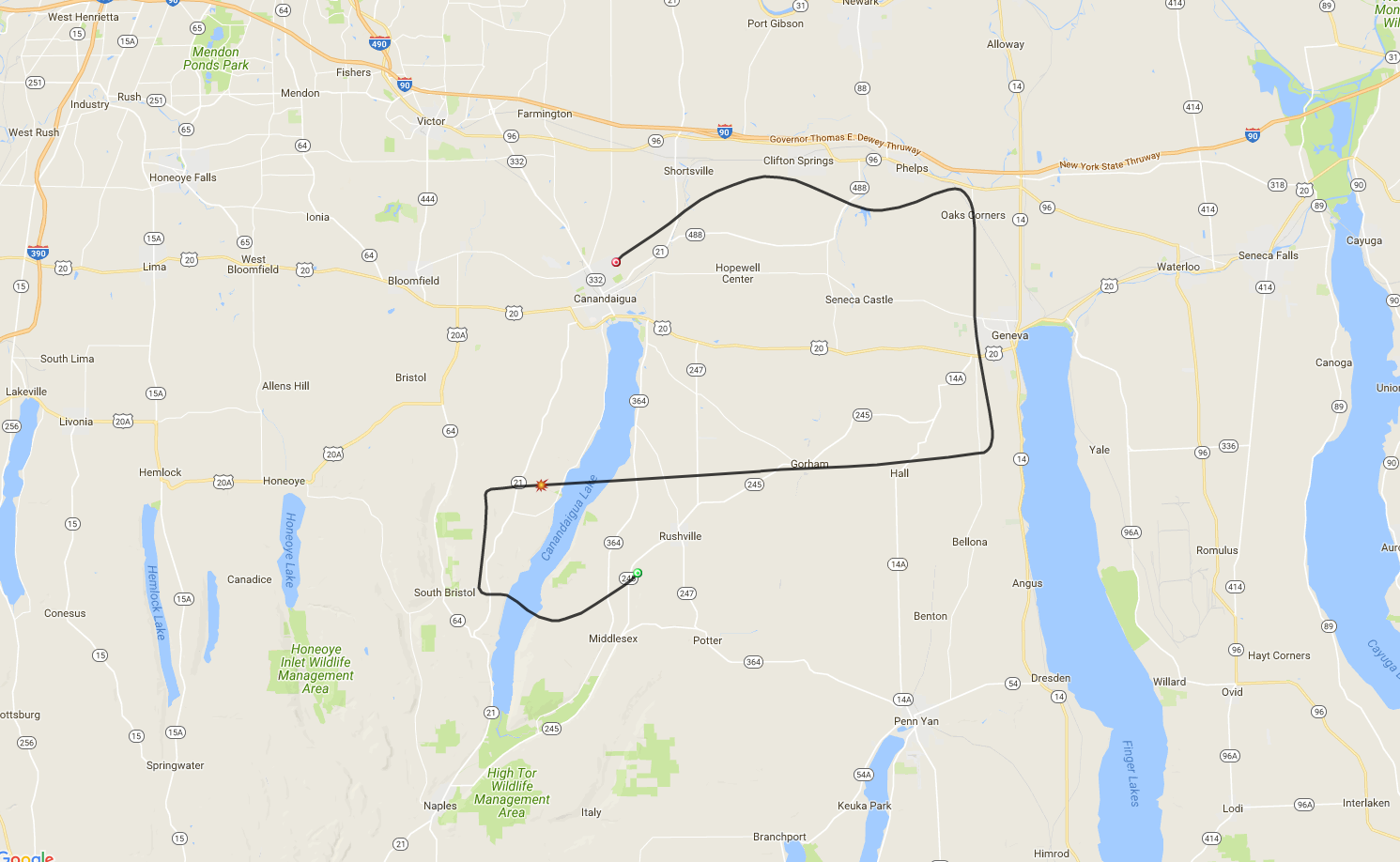
The actual landing site occurred 19 miles to the east of our predicted landing zone. This appears to be caused by an under inflated balloon as we were only able to achieve a measured ascent rate of 3.29 m/s instead of the expected 4.35 m/s ascent rate. We’re still not sure how this occurred as we did triple check our balloon inflation and we had excellent lift prior to launch.
Our recovery team was awaiting landing near Benton, NY on the west side of Seneca Lake, however, the actual landing occurred on the east side of Seneca Lake at the Seneca Army Depot only 12 miles east of where we were waiting, but on the opposite side of the lake, meaning we had to drive around the lake for 45 minutes to get to the landing location. Once we arrived, we were confronted with the gated and locked remnants of the decommissioned Seneca Army Depot. We were unable to reach the payload and decided to try to decipher a legal way in the next day. On our way out, though, we spotted some nearby firemen from the Romulus Fire Department and explained our predicament in hopes they might know who to contact. Surprisingly, they said they could get us access and offered to help us retrieve the payload. They brought along a giant flashlight (it was nearly 10pm at this point) and led the way into the extremely thick forest at the landing site. When we arrived at the payload, we discovered it hanging about 20 feet up with the radar reflector snagged by some skinny trees. We were able to shake the trees enough to free the payload with minimal effort and recovered all parts of the flight.
Strangely, the Arduino eventually regained its composure at 8:30:28pm ET (00:30:28 UTC) about 12 minutes after landing. It lasted only briefly before another power cycle occurred. After this, it was able to record data on 7 more occasions. Additionally, the payload regained complete and reliable broadcast capabilities for the last 20 minutes while on the ground and prior to us opening the box and terminating the power source – strange!
Upon evaluating the payload package, we had reliable positioning data for the first 1 hour and 45 minutes. After that we were able to discern only bits and pieces. Camera #1 on the payload operated flawless, although it experienced some extremely fogging on the lens during descent. Camera #2 failed to record any of the flight. Some how the power to the camera was terminated after initial startup and prior to the payload box even being closed. Camera #3 (the balloon camera) operated as expected, however, the constant power cycles from the Arduino Mega caused the camera to also power cycle. Camera #3 is the only camera that depends on the Arduino for power operations. Cameras #1 and #2 operate independently of the Arduino power. We were able to capture the balloon burst, although the video starts a fraction of a second after the actual burst event. We captured the tail-end of the bursting.
A huge thank you goes out to the firemen from the Romulus Fire Department for assisting us in the dark woods at 10 o’clock at night!!!
Mission Details
Important Info
Live Broadcast


Flight Prediction
Details
Our two prediction tools that we used to predict the flight path strangely disagreed on the flight path right up until launch time. This is very unusual when it gets close to launch time, but both flight patterns were acceptable. The flight path ended up following the main prediction model that we use (CUSF) and the secondary prediction tool (AstraPlanner) matched the other prediction tool in a post-launch prediction we performed.
Technical Specifications
Buy a Shirt & Keep Us Flying!
