1 min read
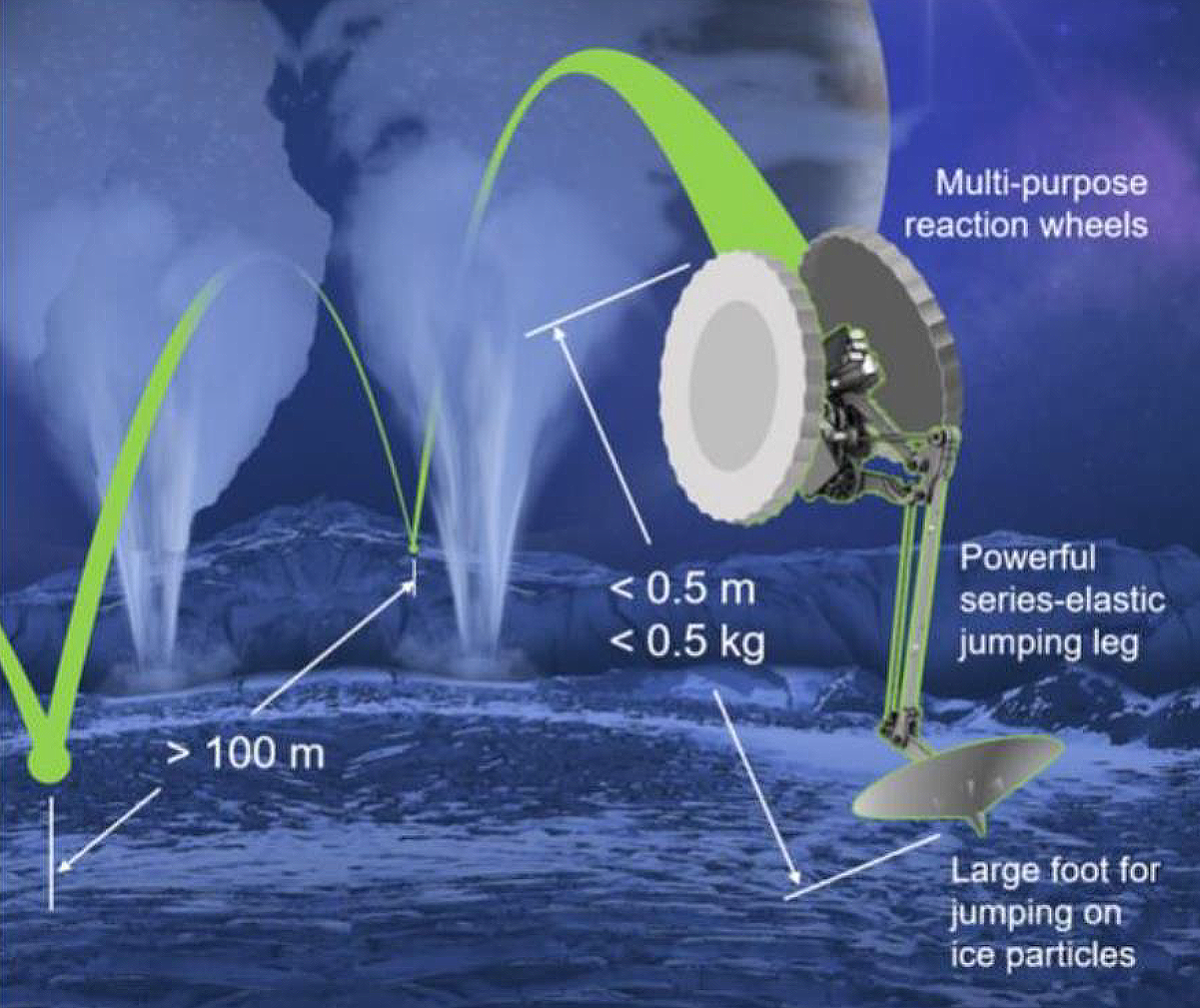
Preparations for Next Moonwalk Simulations Underway (and Underwater)  Artist concept highlighting the novel approach proposed by the 2025 NIAC awarded selection of LEAP – Legged Exploration Across the Plume.NASA/Justin Yim Justin Yim
Artist concept highlighting the novel approach proposed by the 2025 NIAC awarded selection of LEAP – Legged Exploration Across the Plume.NASA/Justin Yim Justin Yim
University of Illinois
We propose Legged Exploration Across the Plume (LEAP), based on the Salto jumping robot as a novel multi-jet robotic sampling concept for Enceladus to be deployed from Enceladus Orbilander. If successful, LEAP will enable collection of pristine, ocean-derived material directly from Enceladus’s jets and measurement of particle properties across multiple jets by traveling from one to another. In low gravity, existing jump performance would be sufficient to leap 90 m vertically or 170 m horizontally in Enceladus’s gravity allowing traversal of jets and collection of direct measurements otherwise not accessible to Orbilander. These measurements could be crucial for investigating the physics of how the plume is connected to the ocean.
Facebook logo @NASATechnology @NASA_Technology
Keep Exploring Discover More NIAC Topics Space Technology Mission Directorate
 NASA Innovative Advanced Concepts
NASA Innovative Advanced Concepts


